Polarimetric Terra-mechanic Sensor
ICS 496 Capstone Project - UH Manoa S25
Project Team
- Kai Garcia: Hardware Design & Data Pipeline GitHub Profile
- Mairi Yoshioka: Machine Learning & Software GitHub Profile
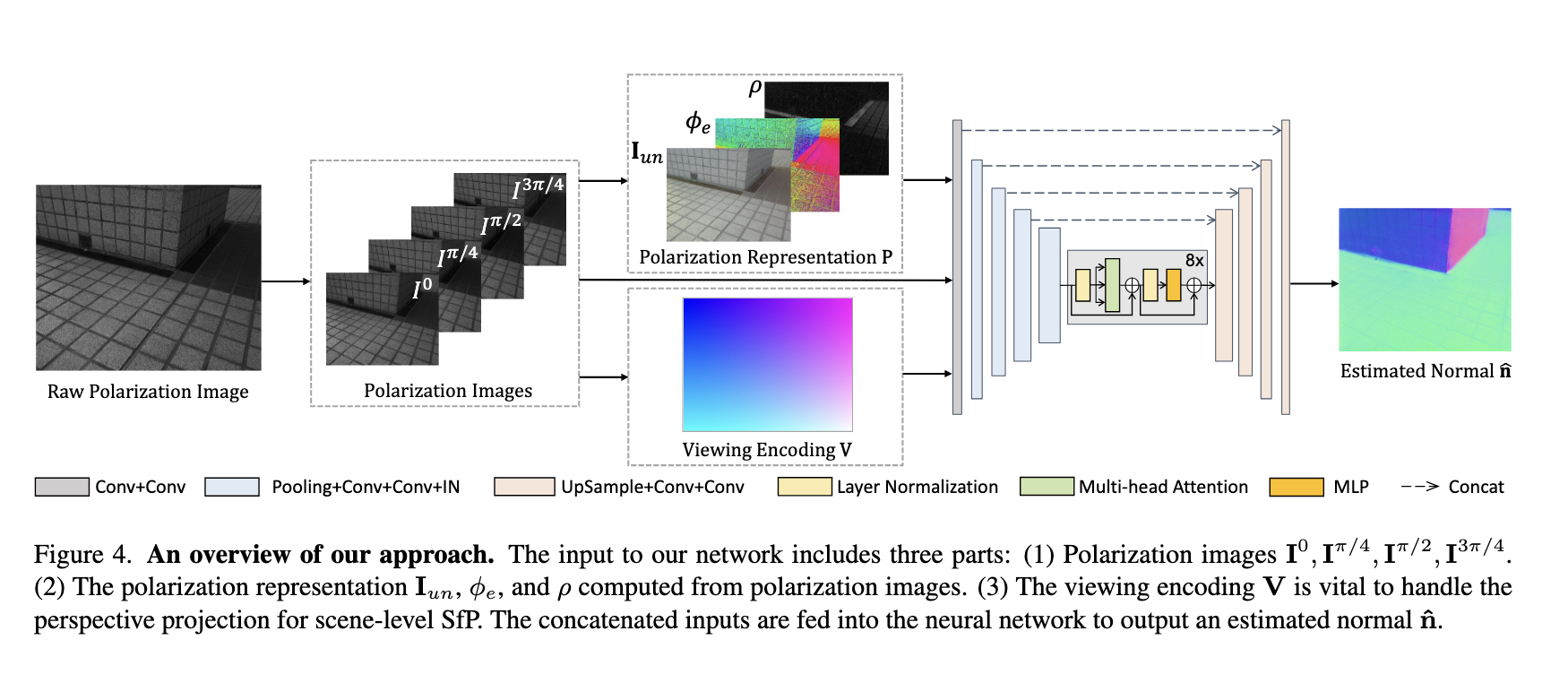
Figure 1: Neural Network Source. Adapted from [1].
Project Details
Polarimetric Wheel Terramechanic Sensor
End Goal: Deliver a working prototype of a polarimetric terramechanic wheel sensor.
System Components:
- Polarization camera and light mounted inside the wheel
- Neural network for data processing
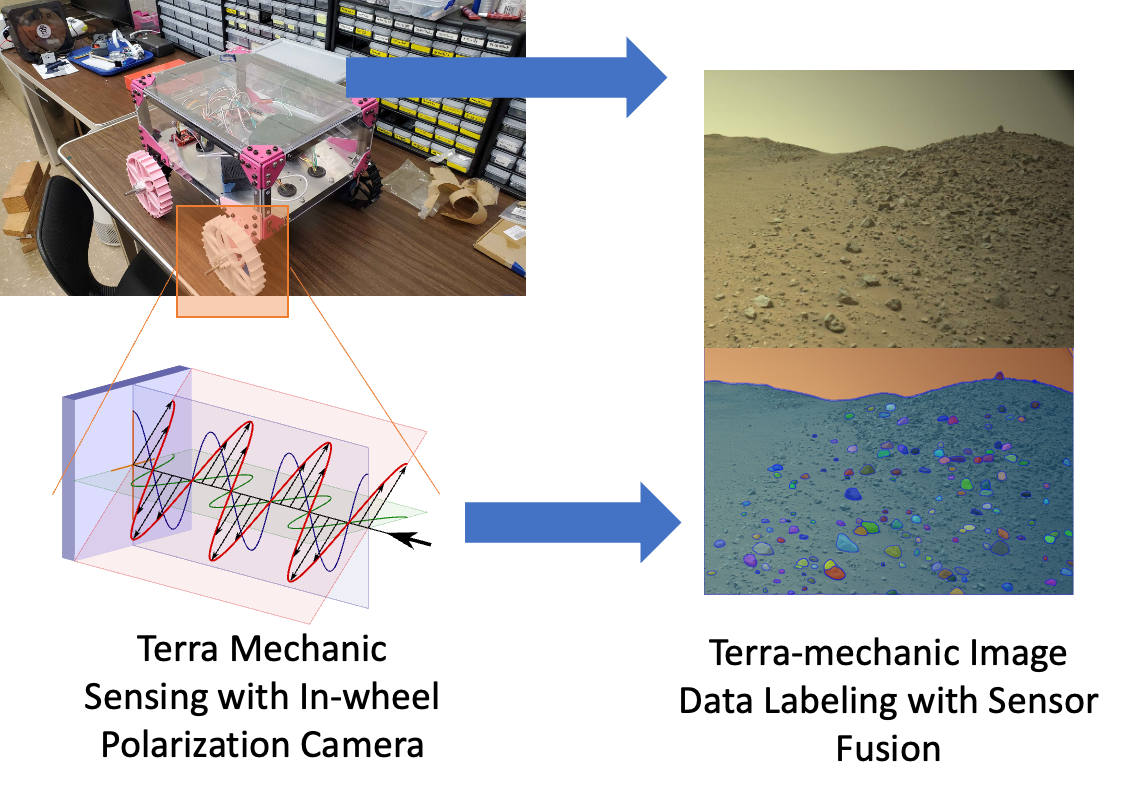
Figure 2: Conceptual diagram of a vision-based terrain traversability system using an in-wheel polarization camera. Adapted from [2].
Weekly Summaries
Week 1:
- Established sponsor and student goals and expectations
- Introduced project details
Week 2:
- Conducted research on polarization and PyTorch
Week 3 (2/5-2/12):
- Set up the camera
- Downloaded the SFP-Wild model
Week 4 (2/13-2/19):
- Developed camera pipeline to NumPy
- Ran SFP-Wild model on example images
About
This project is part of the ICS 496 Capstone Project, focusing on developing an in-wheel polarization camera sensor.
Content sourced from the wheelsensor-ICS496 repository.
Citations
[1] Lei, C., Qi, C., Xie, J., Fan, N., Koltun, V., & Chen, Q. (2022). Shape from Polarization for Complex Scenes in the Wild. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 12632-12641. GitHub Repository
[2] Kalra, A., Taamazyan, V., Rao, S. K., Venkataraman, K., Raskar, R., & Kadambi, A. (2020). Deep polarization cues for transparent object segmentation. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 8602–8611.